
Jiawei Xu ( 许家威 )
Biography
I am a third-year Ph.D. student at Tianjin Key Laboratory of Visual Computing and Intelligent Perception ( VCIP ), Nankai University, advised by Prof. Jian Yang and Prof. Jin Xie (co-advisor). My reseach mainly focuses on:
- World Model & Autonomous Driving.
- 3DGS & NeRF & 3DV.
News
Education
- [Sept. 2023 ~ Present] Ph.D., Computer Science and Technology, Nankai University.
- [Sept. 2019 ~ June. 2023] Bachelor of Engineering, Information Security, Nankai University.
Internship
- [Sept. 2025 ~ Present] Horizion Robotics, Shanghai. Research Intern. Mentored by Wei Yin.
Professional Activities
- Reviewer of NeurIPS.
Recent Publications EponaV2: Driving World Model with Comprehensive Future Reasoning
Arxiv, 2026 Jiawei Xu, Zhizhou Zhong, Zhijian Shu, Mingkai Jia, Mingxiao Li, Jia-Wang Bian, Qian Zhang, Kaicheng Zhang, Jin Xie, Jian Yang, Wei YinEponaV2 is a novel, perception-free driving world model that achieves state-of-the-art trajectory planning by forecasting comprehensive future 3D geometry and semantic representations and employing an LLM-inspired policy optimization mechanism to enhance real-world reasoning and scene understanding.Paper Arxiv Code VGGT-Long: Chunk it, Loop it, Align it, Pushing VGGT’s Limits on Kilometer-scale Long RGB Sequences
ICRA, 2026 Kai Deng, Zexin Ti, Jiawei Xu, Jian Yang, Jin XieTo overcome the memory limitations of 3D vision foundation models, VGGT-Long employs a chunk-based processing strategy with overlapping alignment and loop closure optimization to enable accurate, kilometer-scale monocular 3D reconstruction in unbounded outdoor environments without requiring camera calibration or depth supervision.Paper Arxiv Code AD-GS: Object-Aware B-Spline Gaussian Splatting for Self-Supervised Autonomous Driving
ICCV, 2025 Jiawei Xu, Kai Deng, Zexin Fan, Shenlong Wang, Jin Xie, Jian YangAD-GS is a novel, self-supervised framework for high-quality rendering of dynamic urban driving scenes that eliminates the need for manual annotations by combining a learnable motion model, simplified segmentation, and dynamic Gaussians to achieve performance competitive with state-of-the-art, annotation-dependent approaches.Website Paper Arxiv Code Slides Poster Grid4D: 4D Decomposed Hash Encoding for High-Fidelity Dynamic Gaussian Splatting
NeurIPS, 2024 Jiawei Xu, Zexin Fan, Jian Yang, Jin XieTo overcome the limitations of plane-based methods in Gaussian-based dynamic scene rendering, Grid4D introduces a novel explicit 4D hash encoding with directional attention and smooth regularization, achieving state-of-the-art visual quality and rendering speed.Website Paper Arxiv Code Slides Poster
EponaV2: Driving World Model with Comprehensive Future Reasoning
Arxiv, 2026
Jiawei Xu, Zhizhou Zhong, Zhijian Shu, Mingkai Jia, Mingxiao Li, Jia-Wang Bian, Qian Zhang, Kaicheng Zhang, Jin Xie, Jian Yang, Wei Yin
EponaV2 is a novel, perception-free driving world model that achieves state-of-the-art trajectory planning by forecasting comprehensive future 3D geometry and semantic representations and employing an LLM-inspired policy optimization mechanism to enhance real-world reasoning and scene understanding.
Paper Arxiv Code VGGT-Long: Chunk it, Loop it, Align it, Pushing VGGT’s Limits on Kilometer-scale Long RGB Sequences
ICRA, 2026
Kai Deng, Zexin Ti, Jiawei Xu, Jian Yang, Jin Xie
To overcome the memory limitations of 3D vision foundation models, VGGT-Long employs a chunk-based processing strategy with overlapping alignment and loop closure optimization to enable accurate, kilometer-scale monocular 3D reconstruction in unbounded outdoor environments without requiring camera calibration or depth supervision.
Paper Arxiv Code AD-GS: Object-Aware B-Spline Gaussian Splatting for Self-Supervised Autonomous Driving
ICCV, 2025
Jiawei Xu, Kai Deng, Zexin Fan, Shenlong Wang, Jin Xie, Jian Yang
AD-GS is a novel, self-supervised framework for high-quality rendering of dynamic urban driving scenes that eliminates the need for manual annotations by combining a learnable motion model, simplified segmentation, and dynamic Gaussians to achieve performance competitive with state-of-the-art, annotation-dependent approaches.
Website Paper Arxiv Code Slides Poster 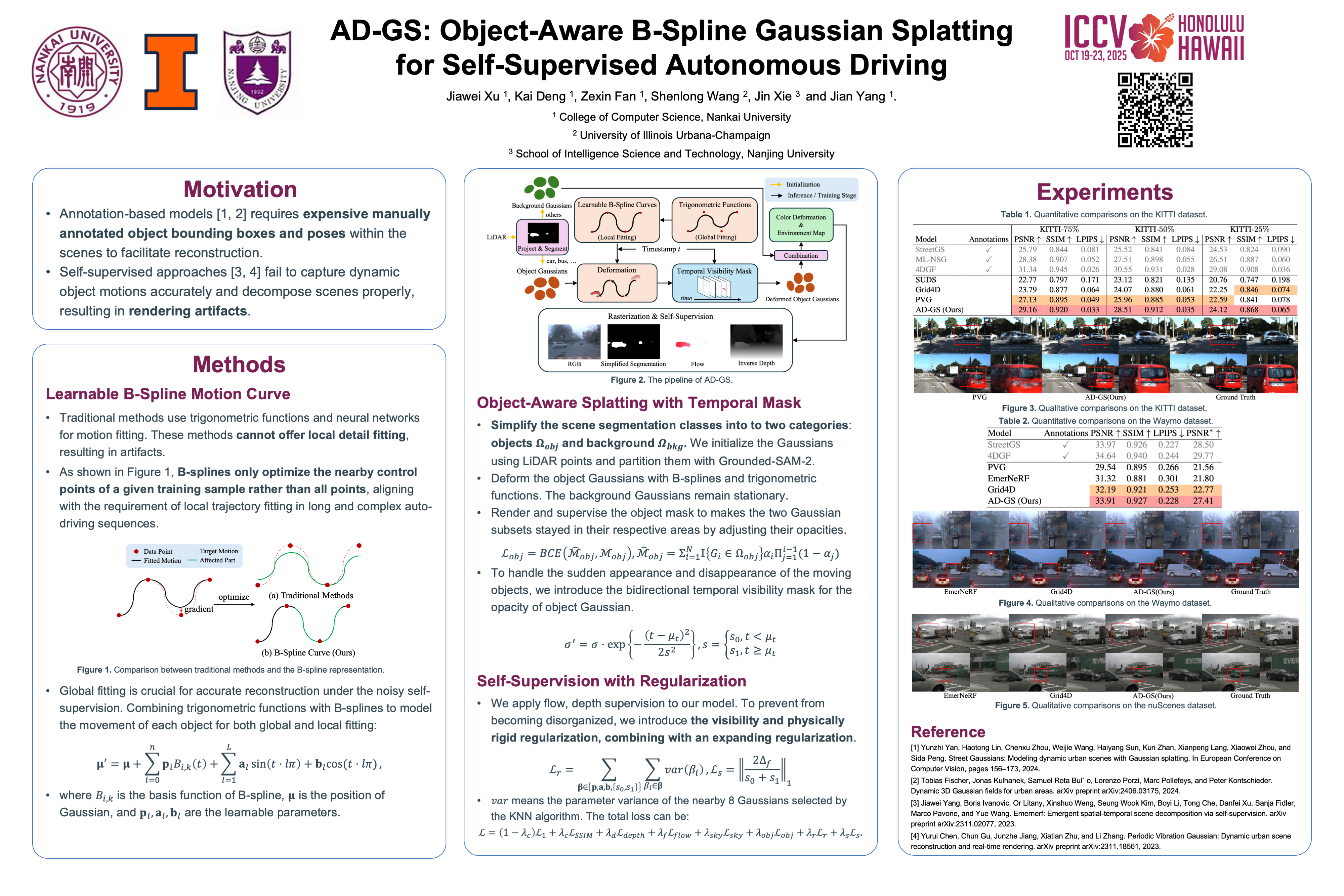{kind=link}
Grid4D: 4D Decomposed Hash Encoding for High-Fidelity Dynamic Gaussian Splatting
NeurIPS, 2024
Jiawei Xu, Zexin Fan, Jian Yang, Jin Xie
To overcome the limitations of plane-based methods in Gaussian-based dynamic scene rendering, Grid4D introduces a novel explicit 4D hash encoding with directional attention and smooth regularization, achieving state-of-the-art visual quality and rendering speed.
Website Paper Arxiv Code Slides Poster 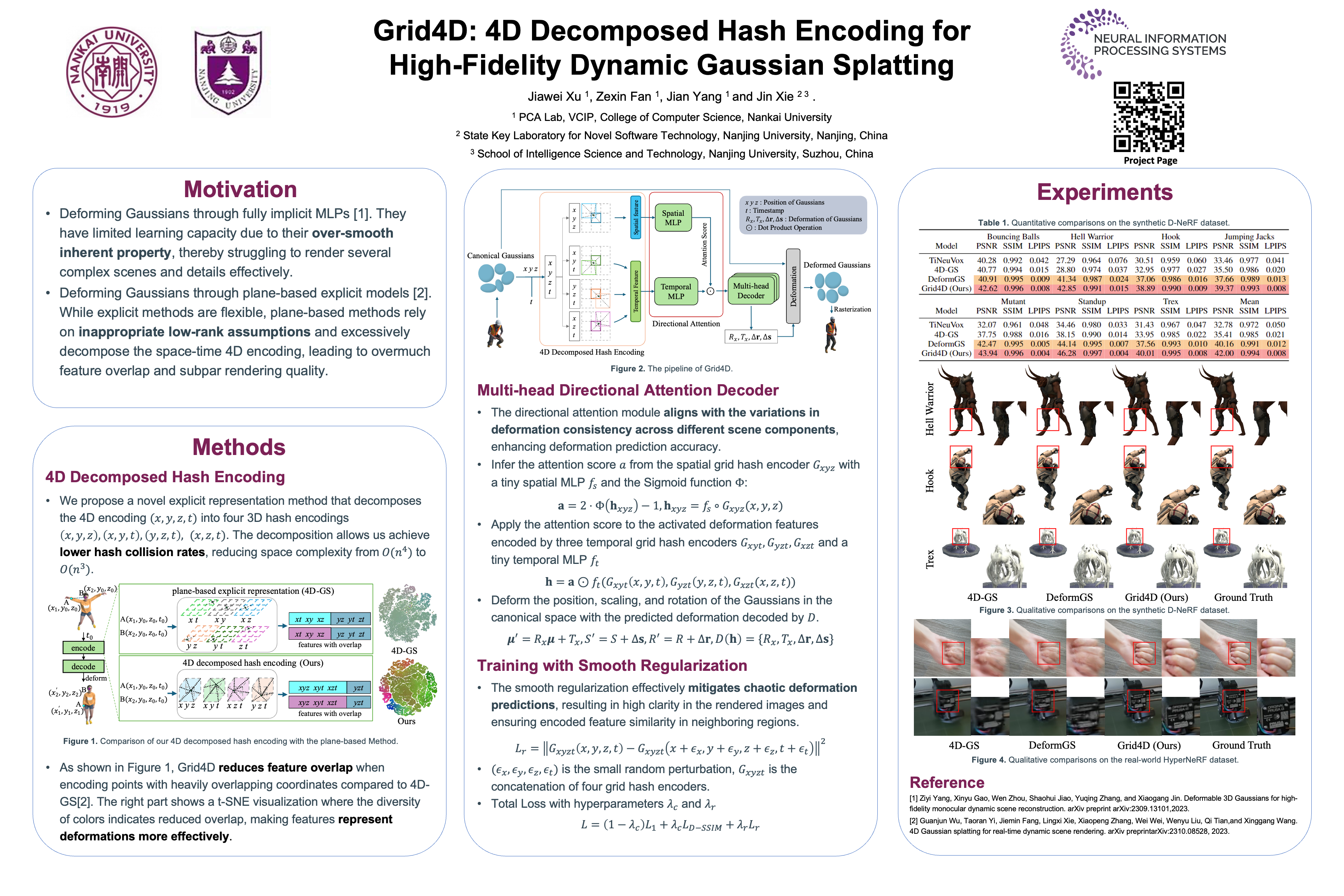{kind=link}